DJI has recently released firmware version 4.02 for NAZA-M V2 flight control boards.
The NAZA-M V2 Flight controller by DJI
This release contains a long awaited fix for the well known “limits bug” that resulted in loss of control of the aircraft if it flow beyond limits, as reported in several threads on RC forums, like this one.
In order to upgrade the firmware on your NAZA MC you should first download and install the version 2.20 of the naza assistant software from the NAZA-M V2 DJI downloads page.
On connecting your NAZA multirotor to the new assistant, upgrade to v4.02 of the firmware will be proposed by the software.
Good news for all pilots that were relying on limits for flying their NAZA V2 controlled flying machines.
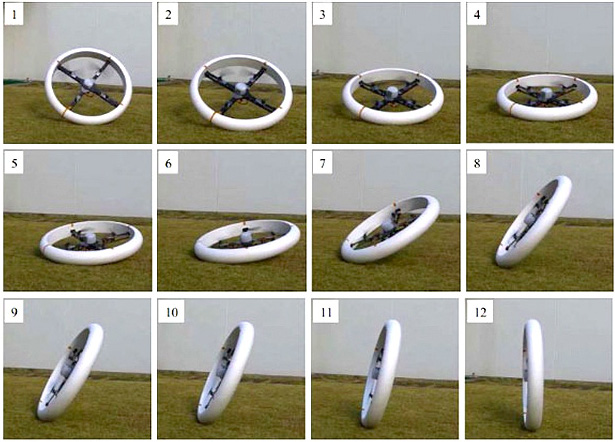
MUWA: Multi-Field Universal Wheel for Air-Land Vehicle with Quad Variable-Pitch Propellers. A complicated name for a new prototype quadcopter that can perform a number of functions usually not associated with multirotors, such as rolling and floating.
Here’s the rolling drone:
MUWA: Multi-Field Universal Wheel for Air-Land Vehicle with Quad Variable-Pitch PropellersThe MUWA quadcopter
This is not for fun. It is a research project developed in a robotics lab in Tokyo University and has a number of very serious potential applications that are briefly shown in the video that we post below. Those include capturing 3D images of environments, for example closed spaces, maybe difficult to reach otherwise.
The device can of course perform also perform as a regular quadcopter. It flies nicely.
A video from AMA (Academy of Model Aeronautics) president Bob Brown explains how AMA always embraces new technologies and supports research, continuously updating AMA programs and guidelines.
AMA Logo
First Person View (FPV), quadcopters and multirotors are no exception and it is great to hear that President Brown himself is “one of us”, owning two quadcopters and practicing FPV himself.
The Baltimore Sun features a terrific interview to drone photographers Terry and Belinda Kilby, who just published a book about drone photography in Baltimore: Drone Art: Baltimore and run the site Elevated Element.
A photo from the book Drone Art: Baltimore by Terry and Belinda Kilby – Source
The interview is very generous and covers nearly all aspects of their activity, from equipment, both drones and cameras, to considerations about the workflow they have established and to the management of security.
They tend to select places and timing to ensure as few people as possible are around. Say sunday at 6AM. If required, they define a clear area for takeoff and landing, and they communicate clearly to bystanders what is going on and where to stay to remain secure.
They apparently are well known drone operators in the area, as they got a phone call from the FBI as someone else was flying a drone outside hotel rooms. They state they would never do that and take every precaution, such as the ones mentioned above, to ensure everything remains safe for everyone.
They stepped up through a couple of generations of GoPros, to Cannon S90 an then Sony NEX 5N.
They build all their multirotors themselves.
Terry and Belinda Kilby hexacopter equipped for drone photography – Source
With the raise in availability of drone technology, Merseyside police in the UK thought it would be a good idea to acquire a drone, actually a 13.000£ quadcopter, to aid in law enforcement tasks.
And here is the drone in operation live:
November 2009: Merseyside police acquires law enforcement quadcopter
The quadcopter is put to use, officers are trained.
February 2010: Merseyside police makes the first arrest in the UK based on drone technology, by helping in locating a car theft suspect – BBC article
However about one week later, it turns out that the police did not have the required Civil Aviation Authority (CAA) permission to fly the quadcopter.
“CAA said it needed to be consulted over any use of the drones, that can fly up to 400ft and reach speeds of 30mph.”
February 2010: Merseyside police drone is grounded for the lack of the required flight permissions by the CAA – BBC article
The police subsequently filled out the required paperwork and obtained all the permissions to fly the drone.
During a flight training session the drone apparently looses battery power and crashes into a river. Officers responsible for the crash were “given advice” (a dressing down in police slang). The costs of the incident were covered by insurance. Interestingly
“during its use officers recognised certain technical and operational issues including staff training costs and the inability to use the UAV in all weather conditions.
“These issues in conjunction with the current financial climate resulted in the decision being made by chief officers not to replace the unit.”
October 2011: Merseyside police drone ceases operations
This story is very interesting as it is an example of trying to put to work an idea that in principle seems potentially productive, and then coming in touch with all the hidden problems involved and the technical and, not least, budget limitations. I think the idea was good but the technology was still too young in 2009 to make drone law enforcement become a reality on a limited budget. I would guess that if the very same program was started today, it would probably have more chances of success as there was so much research and development done from 2009 to today in multirotors technological development, navigation systems, better and lighter frames with higher payloads, longer flight times, better resistance to variable weather conditions etc.. We can see this as an early, brave experiment that failed. We’ll probably see other similar program succeed more and more in the future, as technology evolves and equipment prices drop steadily.
Quadcopters and multirotors are becoming devices affordable for anyone, to take aerial video and photographs or just to experience the adrenaline burst that comes from controlling the aerial evolutions of these flying machines.
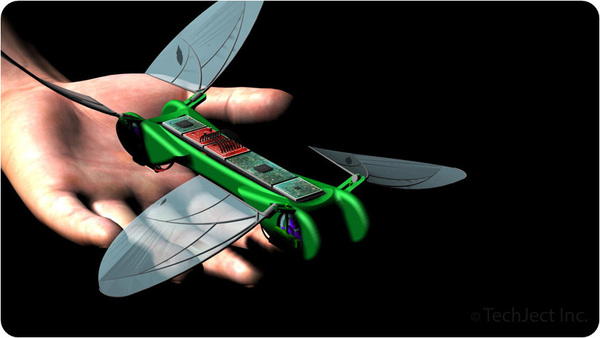
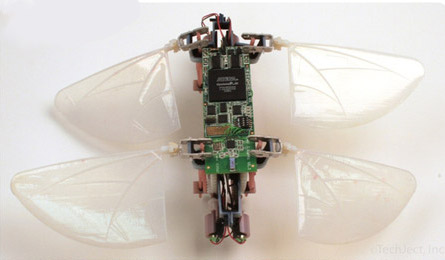
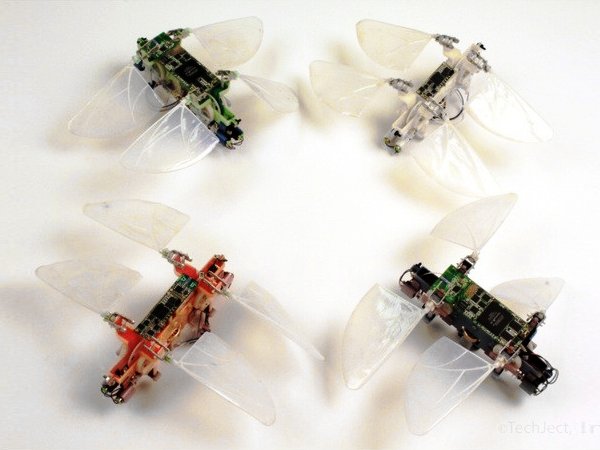
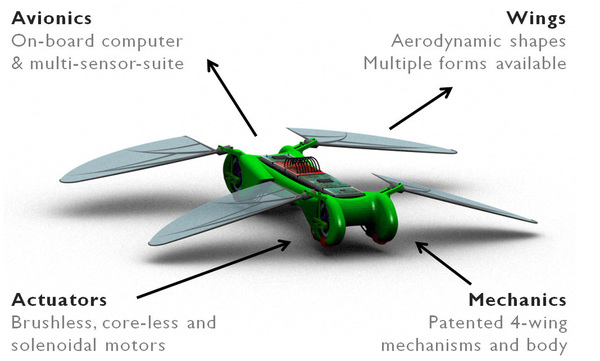
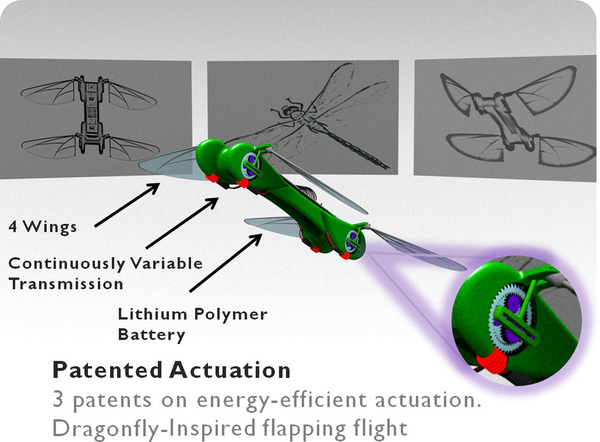
A new generation of flying machines is at the doorstep. Meet the Dragonfly.
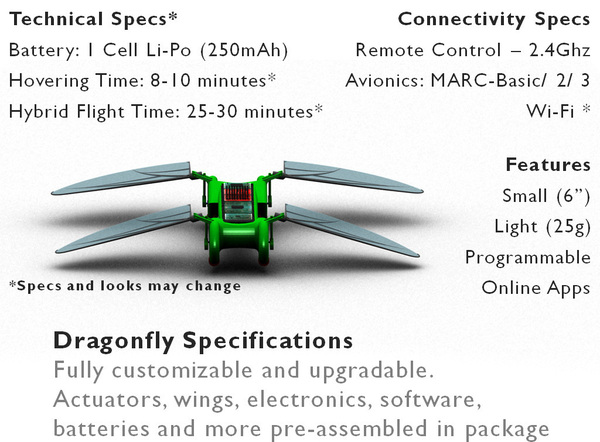
Please note: Hybrid flight time: 25-30 minutes. This thing can hover like a quadcopter and glide like a plane.
Silent. This is a big difference with quacopters and multirotors and opens for different fields of application.
Onboard high resolution cameras and GPS.
A game changer by all means. According to the website, we could start to see some on those on the market within a few months, possibly starting from november-december 2013, based on the fact that release of the kits to distributors is scheduled for october 2013.
Here are some dragonfly videos:
A quest toward the perfect quadcopter or multirotor for aerial video and personal flying freedom and a permanent survey on the latest quadcopter news and multirotor news
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt-out if you wish.AcceptPrivacy and Cookies Policy
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the ...
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.