As a follow up to the previous post on
Advances in setting up Hobbyking’s Integrated PCB Micro Quad PNP with kk2.0 flight controller
Great news: propellers from hobbyking arrived today, so I was able to complete the setup. Trimming correctly was a bit tricky, but I think I got quite right. It is a bit unstable on take off but then catches up quickly as it gains some height.
The default landing gear seem to be expressly designed to have the quad tilt on landing and arms crash on the floor, as it provides a very narrow base. Hence the ping pong balls mod.
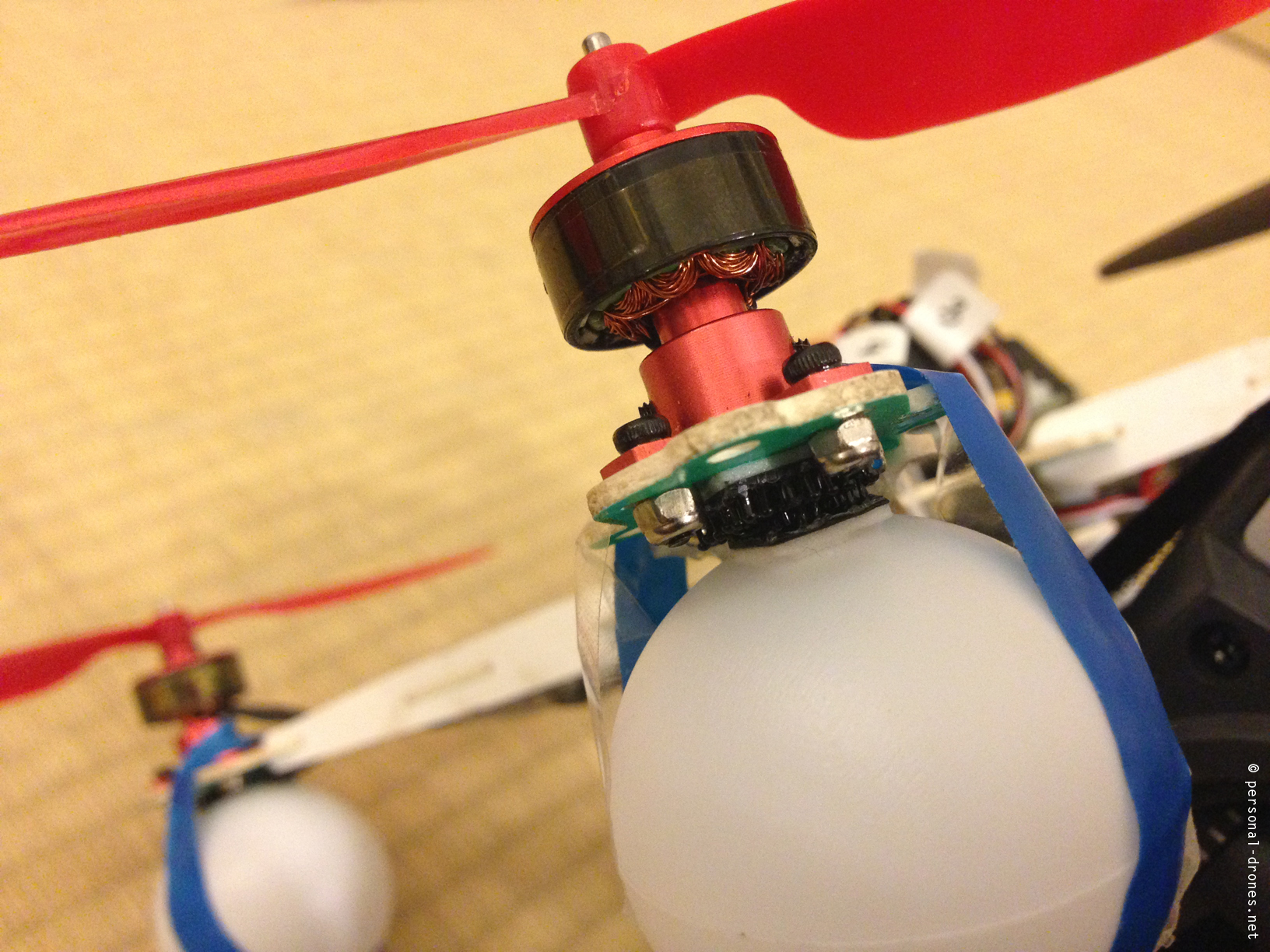
Here you go:
Edit: Moved the ping pong balls more toward the center, as right under the motors is not a good place to avoid stress to the “weak spot”. Also added a mobius camera to check for video stability and as a first step toward an FPV setup. A soft sponge ball was zip tied to each arm, and covered with tape for additional arms protection.



Hi!
I ordered the same quad and your first post was VERY useful!
Looks like your quad needs some tuneup around the stabilization values.
There is a serie of videos from HK about the kk2 board and one of them is about the kk2 in the micro quad and is giving good leads on setting up the stabilization :
http://youtu.be/00PoZ5Xza8k
I do not have as much time as I wish these days to fly my quad, almost everything is calibrated and I hope to make first flight next week!
Thanks for the tip on landing gear stability, I think I will add 2 carbon rods from a kite crossed on the bottom as a trainer landing gear.
Do you know what are the extra nuts and foam pads for?
Hey Xavier thanks for your comments! The video you post is very useful. Carbon rods sound excellent. Mind that with the ping pong balls, at the end I mounted them not straight under the arm ends as in the photo, as on landing this will still stress the “weak spot” on the arms. Mounted then slightly more internally toward the quad center. Between the motor screws and the ESC, and not right below the motor screws as in the photo above. This saved my arms a few times I think, the quad is way too fragile. Keep reading around about people crashing it for good. Hope to hear again from you soon, keep visiting!
I read that the frame is very weak to, that’s why I ordered 2 bags of spare props and an extra servo so that I can make my own Y frame (Actually I ordered 3 sub micro servos to make a small plane with the extra motor and esc when I turn it to a Y copter).
Today I mounted my propellers on the quad, calibrated my escs and kk2 board using your post and took off for the first time. I will probably tweak the pid settings using the video I recommended, stability is great but I still have a lot of oscillations.
I like the news part of your blog, very interesting!
Thank you Xavier, keep me posted! And tell your friends about us!!!
No problem! A lot of my coworkers are into multi rotors.
Could you recommend a camera+transmitter that would fit the microquad?
Xavier I edited the post to add a couple of photos of my current setup for you. Please note that the ping pong balls were moved and additional foam protection was added to each arm (a sponge ball was zip tied to the end of each arm). Also see how I was able to fit a mobius camera. The weight of the camera is handled beautifully by the quad, not sure how it would perform with a transmitter aswell. Maybe together with the transmitter an 808 #16 could be used, much lighter than the mobius. I use FatShark so I tend to select compatible transmitters such as immersion or this one, which has a broad compatibility: http://www.foxtechfpv.com/58g-600mw-32ch-vtxrx-p-1118.html. So an 808 #16 camera with this transmitter or an immersion: http://www.readymaderc.com/store/index.php?main_page=product_info&cPath=165_40&products_id=266 could be a good and affordable setup I think, that let you fly FPV and record video at the same time. Let me know if you come up with something nice, I am interested.
Hope you will have a nice flying week! PD
My battery charger died. I am grounded 😉 I will stop by a friend tomorrow and ask for his!
Crap!!! I had really decent flights (indoors) and really enjoyed the stability. Only had to tweak some settings and add expo to elev/aileron, the quad needed really few orders to stay still.
I’ve flown it for about an hour total. On the last flight I forgot to activate self level, got cocky and crashed in a wall : http://www.flickr.com/photos/xavtek/10978090335/
I will glue it back until I need to buil a new frame…
By the way, judging by the weight of some parts I had lying around, the original frame is far too heavy!!!! I am sure I can make a lighter frame.
Xavier you might want to have a look at how this guy “migrated” the electronics to another frame, self made:
http://garagepilots.com/forum/topics/turnigy-micro-quad-hack