As noted in this interesting article at smartdrones, at the moment security does not seem to be at the first place in the mind of quadcopter and multicopter producers and designers.
As a simple observation, as things stand now, if a DJI Phantom motor or esc fails during flight, the quadcopter will crash for sure. Whether it hits and injures somebody or something, is just a matter of chance. The probability of some damage is dependent on the density of targets in the flying area. If the area is heavily populated, or worse, if flying over a crowd, bad things can and will happen.
Rotating blades are like knives, and usually exposed on current quadcopter models.
Technology and design already provide some interesting solutions, that are however applied only in rare cases, and nearly never by default on current models.
Raffaello D’andrea showed that a quadcopter is able to fly, although in a strange way (continuously yawing), with just two opposite motors working instead of 4. See the following video from 6:30
So on a motor failure, in principle the opposite motor could be automatically shut off and the quad forced into “yaw mode”. This by itself could prevent so many crashes.
Another example of available technology is the use of parachutes that can be triggered from the radio if something goes wrong during the flight, here you go:
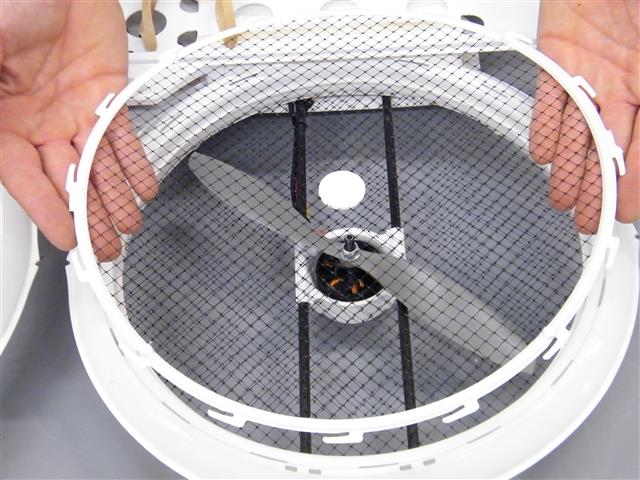
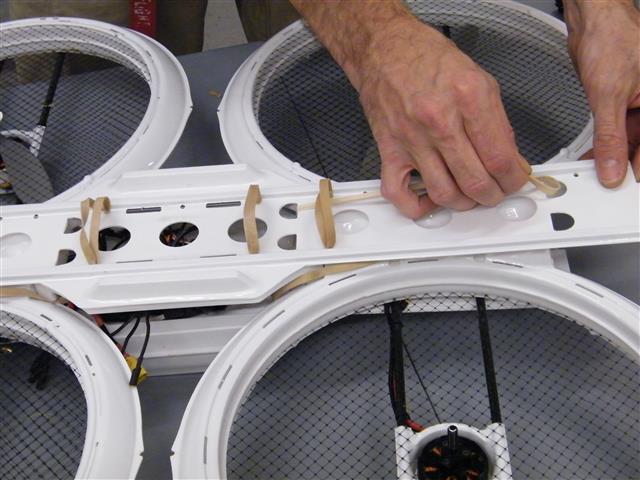
Last but not least, quadcopter and multirotor frames could be constructed with some kind of embedded protection for the propellers. This is the approach Safeflight Copters is developing, images were taken from the Safeflight web site:

See how it looks in action:
http://www.youtube.com/watch?v=WgxGYE6gloc
This is an interesting project I will keep an eye on. I love the idea to be able to crash with no fear of damage to things or people. Might well get one of those frames in the future.
2 thoughts on “Quadcopters and multirotors, a focus on security”