All-in-one set has everything you need to bring “Tiny Whoop”-style racing into your home
ROCHESTER, NY — April 3, 2017 — Aerix Drones announced the release of the new Nano FPV Indoor Drone Racing Package. This “Tiny-Whoop” inspired set includes everything you need to start enjoying the thrill and excitement of drone racing in your home. The ready-to-race (RTR) drones are safe to fly indoors, but fast enough to be seriously fun.
Thank you to David Gonzalez, founder of SkilledFlyer.com, for contributing this nice article that covers the basics of FPV flying. Enjoy the read!
####
By David Gonzalez
FPV flying is arguably the most exciting part of owning a drone. Imagine being able to see what your drone is seeing in real time- that’s the magic of FPV flight. In this article, we’re going to talk about what FPV flying is, the rules you’ll need to follow, and how you can get started.
FPV Flying – Overview
So, what does the acronym “FPV” even mean? It stands for First Person View, which basically means that you get to see exactly what your drone’s camera is seeing, without lag. Flying this way is a lot of fun, and allows you to fly your drone further and more aggressively than you normally would. FPV technology is pretty much the heart and soul of drone racing, a revolutionary sport that’s taking the world by storm. Continue reading Everything you need to know about FPV flying→
Check out this very interesting video that features an experiment in which a car is driven by a pilot that views the car and street thanks to a video feed from a drone.
Driving a car “Third Person View”, from an aerial perspective thanks to a live video feed from a drone
It looks and feels very much like a video game.
The pilot is getting a live video feed from the drone thanks to FPV goggles
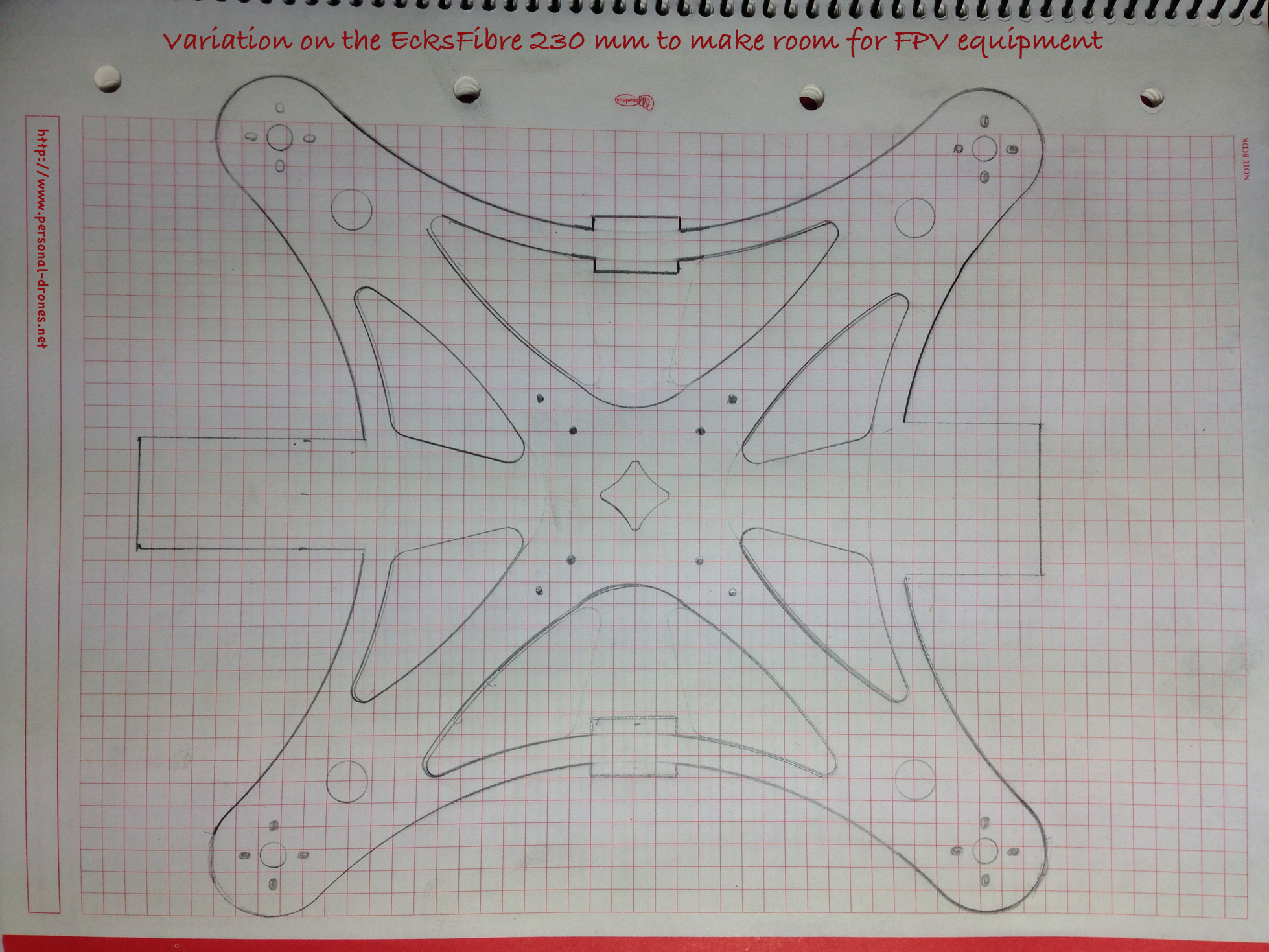
I’d like to report on my latest build in the quest for the perfect mini personal drone. Like the mini H quad and the mini quad for FPV builds, this is again a small quadcopter, that should be possibly slightly smaller than the last one.
I started from an EcksFibre 230mm frame as a template. The main goal is to modify the design so as to include extension plates for a mobius camera and an immersion RC 600mW video transmitter, for First Person View flight.
The EcksFibre 230mm frameThe plan: adding extensions for a Mobius camera and an Immersion video transmitter
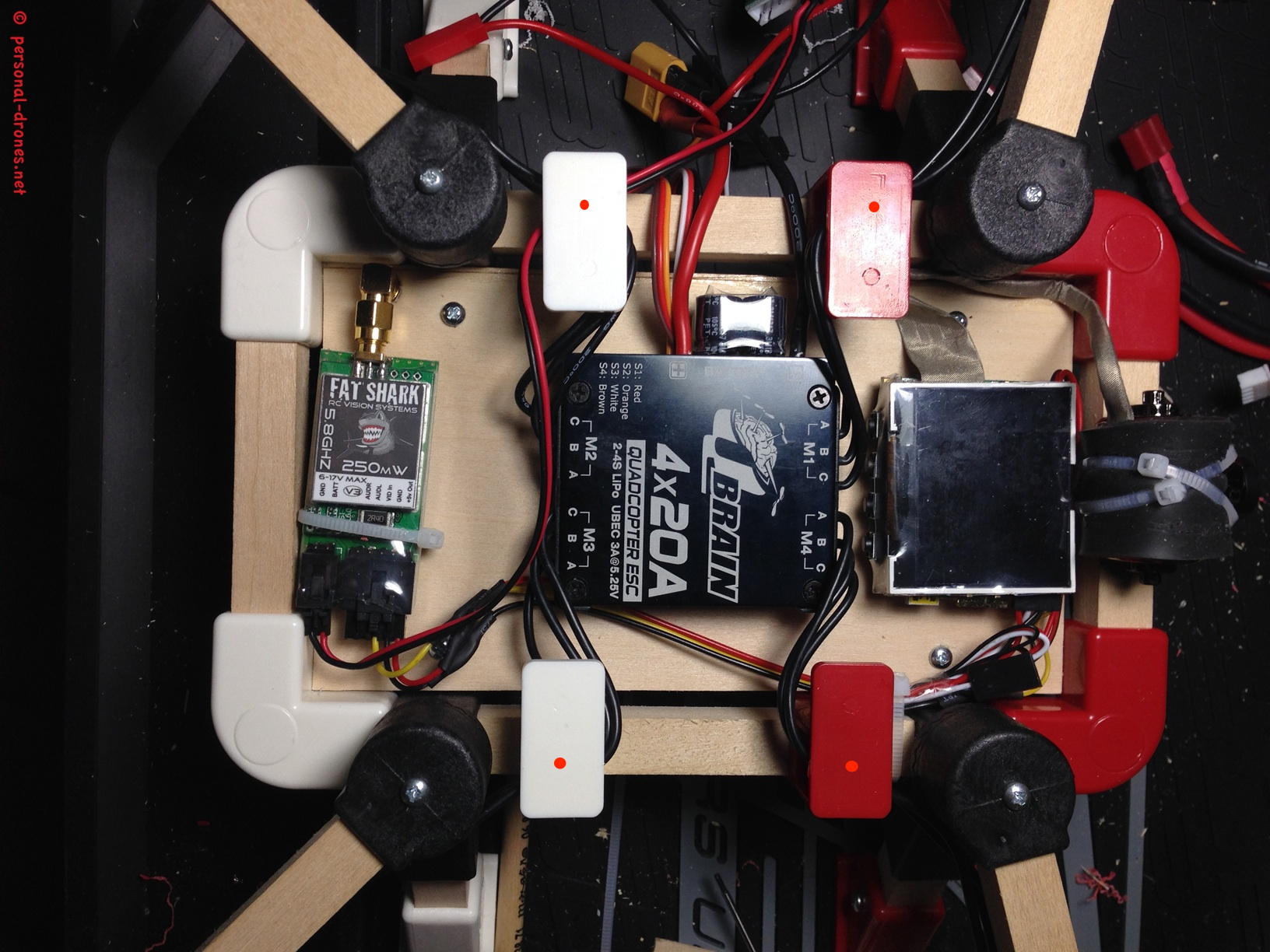
If you followed up to here in this multi part article on the Quadlugs multirotor building system, you know that we are now at a stage in which we have a basically fully assembled 480 mm quadcopter, with motors, escs, and FPV equipment in place. In the image below the placement of the electronics on the lower board is shown. We will have to drill the 4 positions marked by red spots in the figure in order to secure the upper deck in place.
Electronics on lower deck. Points to drill to secure the upper deck are marked with red spots
We now need to finish the build by mounting the upper deck with control board and radio receiver. mounting the upper deck is straightforward. First, drill the upper plate lugs in the positions marked in the figure above. You should do this with extreme care as the ESC wires, in the suggested configuration, run into the lug hole. You could also remove the wires while you do this, or drill before inserting the wires. Then with a pencil, carefully mark the position that correspond the the drilled holes to the wood board. Mind that the board, like the lower board, is larger than required. I did cut down mine to 8.5 x 13.5 cm in order to fit this design. Continue reading QUADLUGS MODULAR MULTIROTOR SYSTEM QUADCOPTER BUILD AND REVIEW – PART 4→
In part 1 and part 2 of this “build and review” article I made a general overview of the Quadlugs modular system and showed how to fully assemble a 480 mm frame. The whole process takes a few hours, especially the first time, when you have to figure out a number of things. I am sure that on my second build (there will definitely be one) things will go much faster. Also, since the things I had to figure out are all included in this review, if you follow instruction closely, and also check out the Quadlugs build videos, then the build of the frame should be really straightforward. Speed will also depends somehow on your personal DIY skill, although I promise that putting the frame together is something that anyone can do.
The frame is now ready, see part 2. Only the top plate remains to be secured in place, however this will be done after all the electronic equipment is mounted.
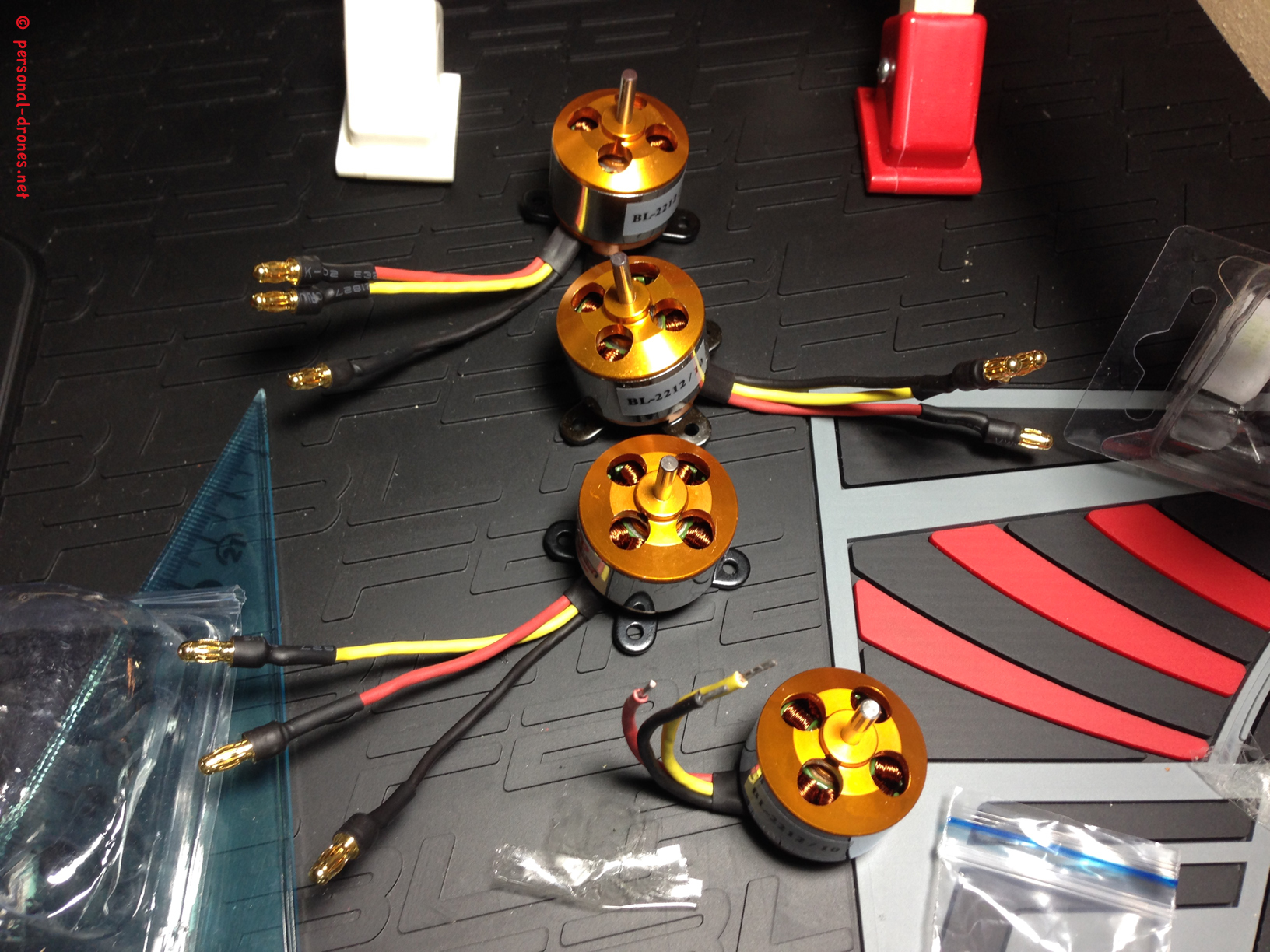
Let’s start by fixing the motors to the motor mounts. In this case, the motors came without the needed 3.5 mm gold connectors (link) pre soldered to the wires, so I had to solder the connectors myself:
Suppo motors 1100 KV, soldering of 3.5 mm gold bullet connectors in progress, 3 out of 4 motors done.
In part 1 of this build and review article I have been looking at the general features of the Quadlugs multirotor modular system and some preparation steps required before the actual frame assembly, namely the drilling of holes in some of the lugs.
2. Quadlugs quadcopter frame assembly
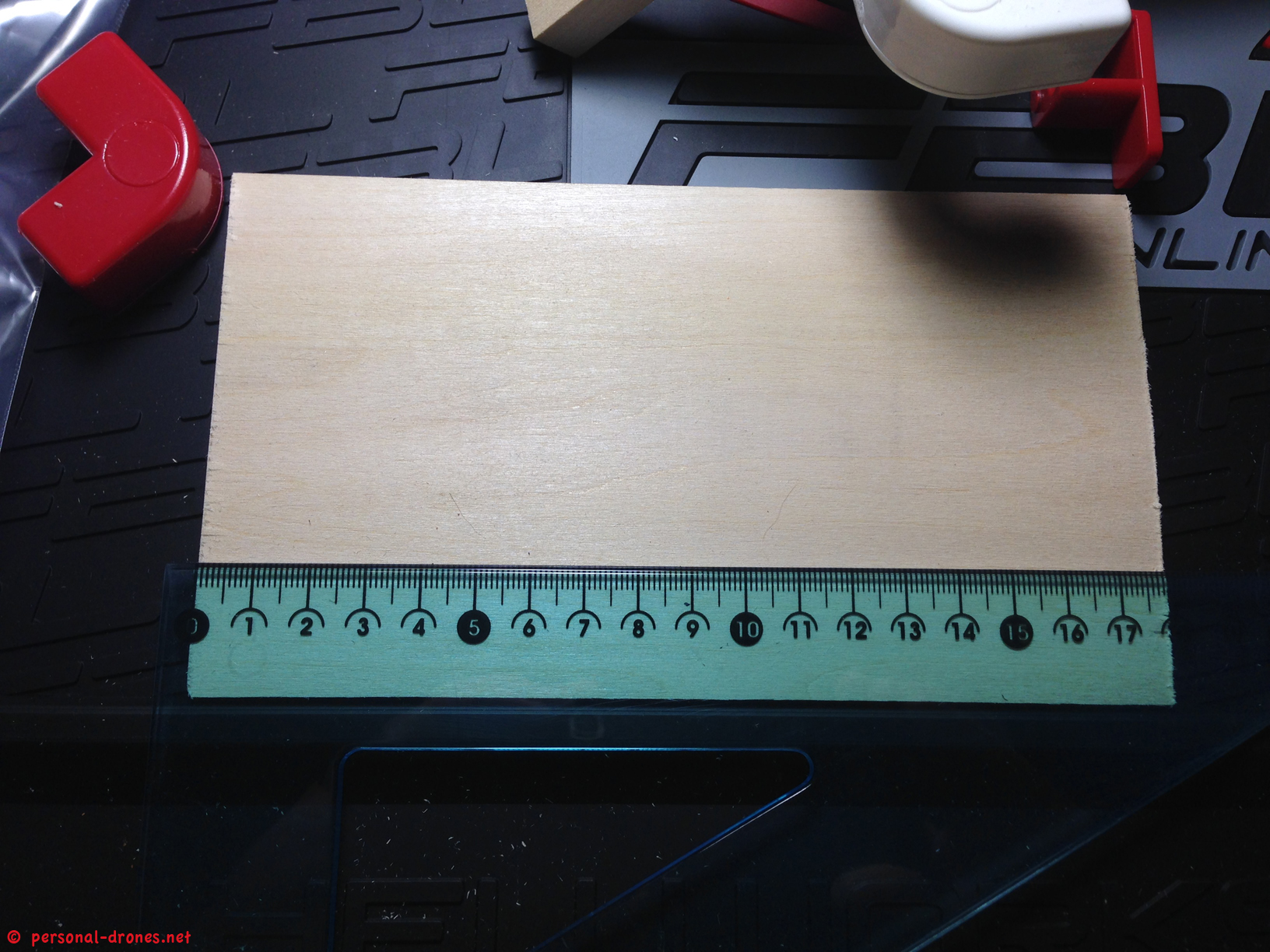
Before we actually assemble the frame, we have adapt the bottom plate, which is slightly larger than possibly needed.
The original size of the provided bottom plate is 17,9 x 10,1 cm (and 3 mm thick):
Measuring the bottom plate heightMeasuring the bottom plate width
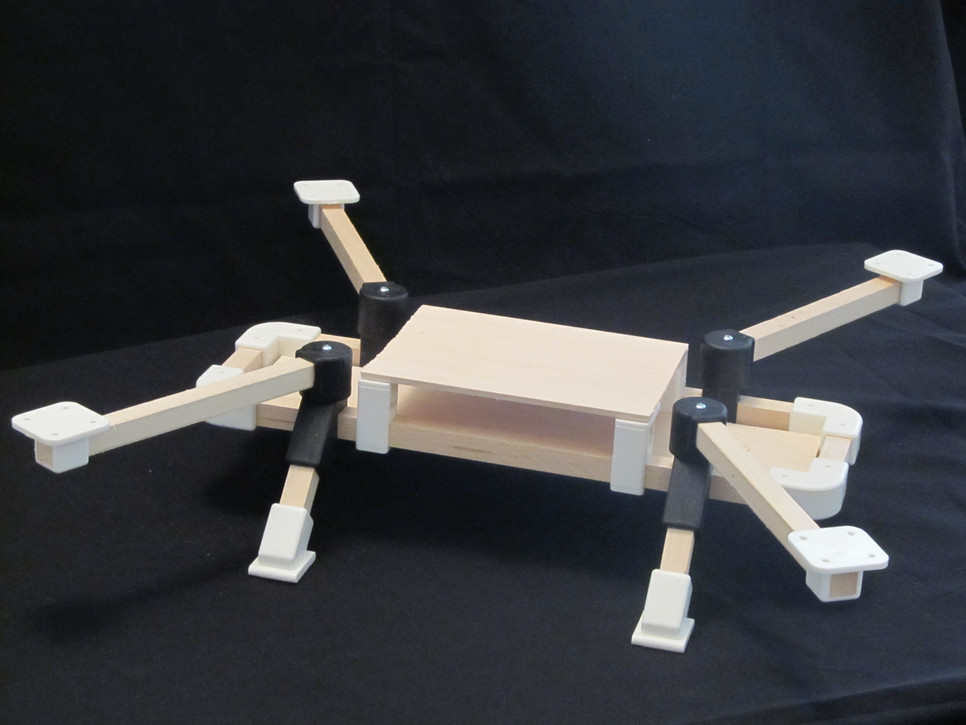
I have received a nice USPS box from Danny, funder of the Quadlugs multirotor modular system and started a build with the main purpose of testing this original piece of technological equipment for strengths and weaknesses, report to our blog readers and providing a build blueprint for others that might want to built their own Quadlugs based multi rotor.
A packet from Quadlugs!A mounted Quadlugs frameThe result of quite some work on the packet contents: a Quadlugs 480 build for FPV, straight from the Personal Drones Blog! Stay with us and build yours by following our simple instructions
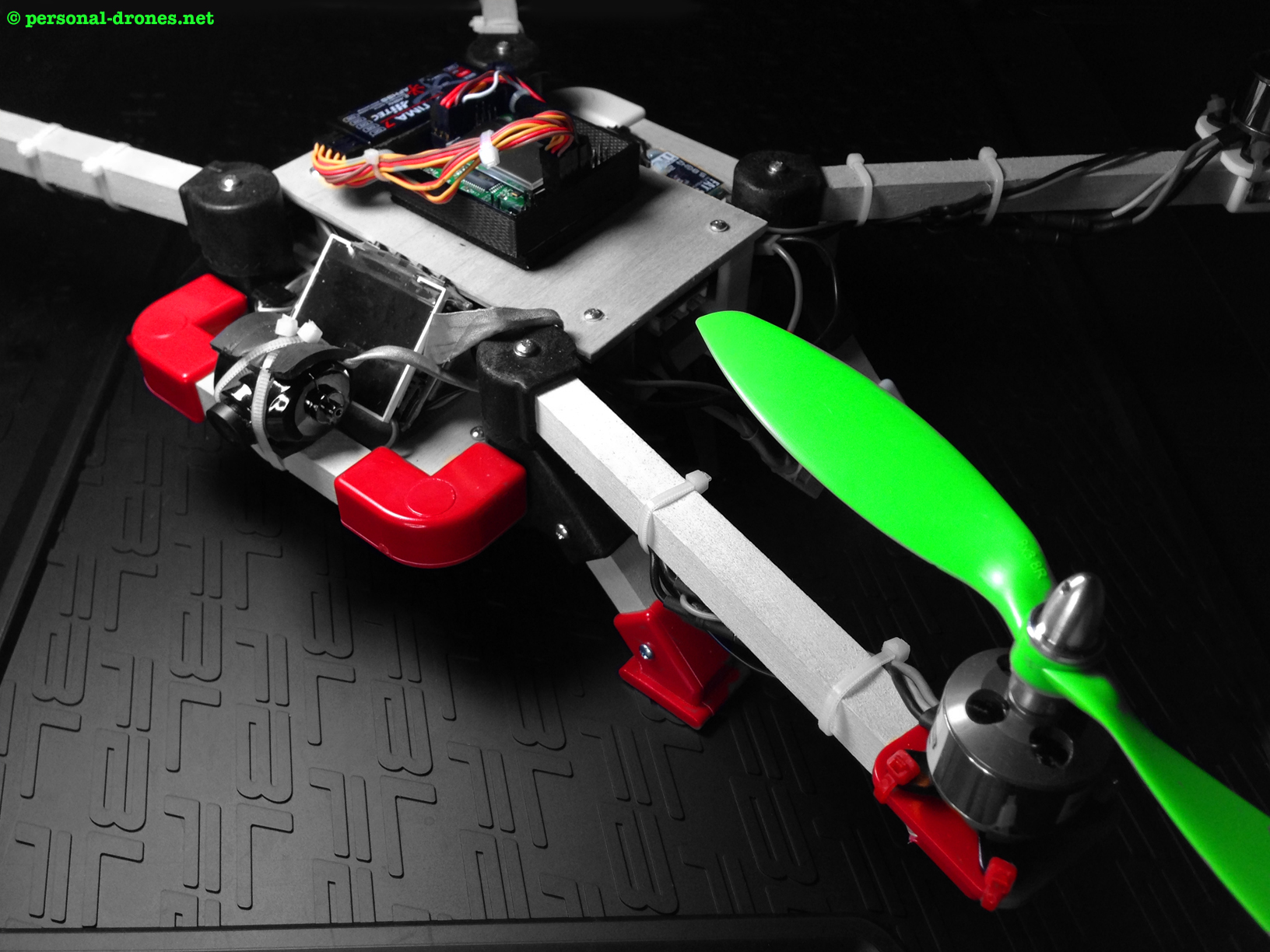
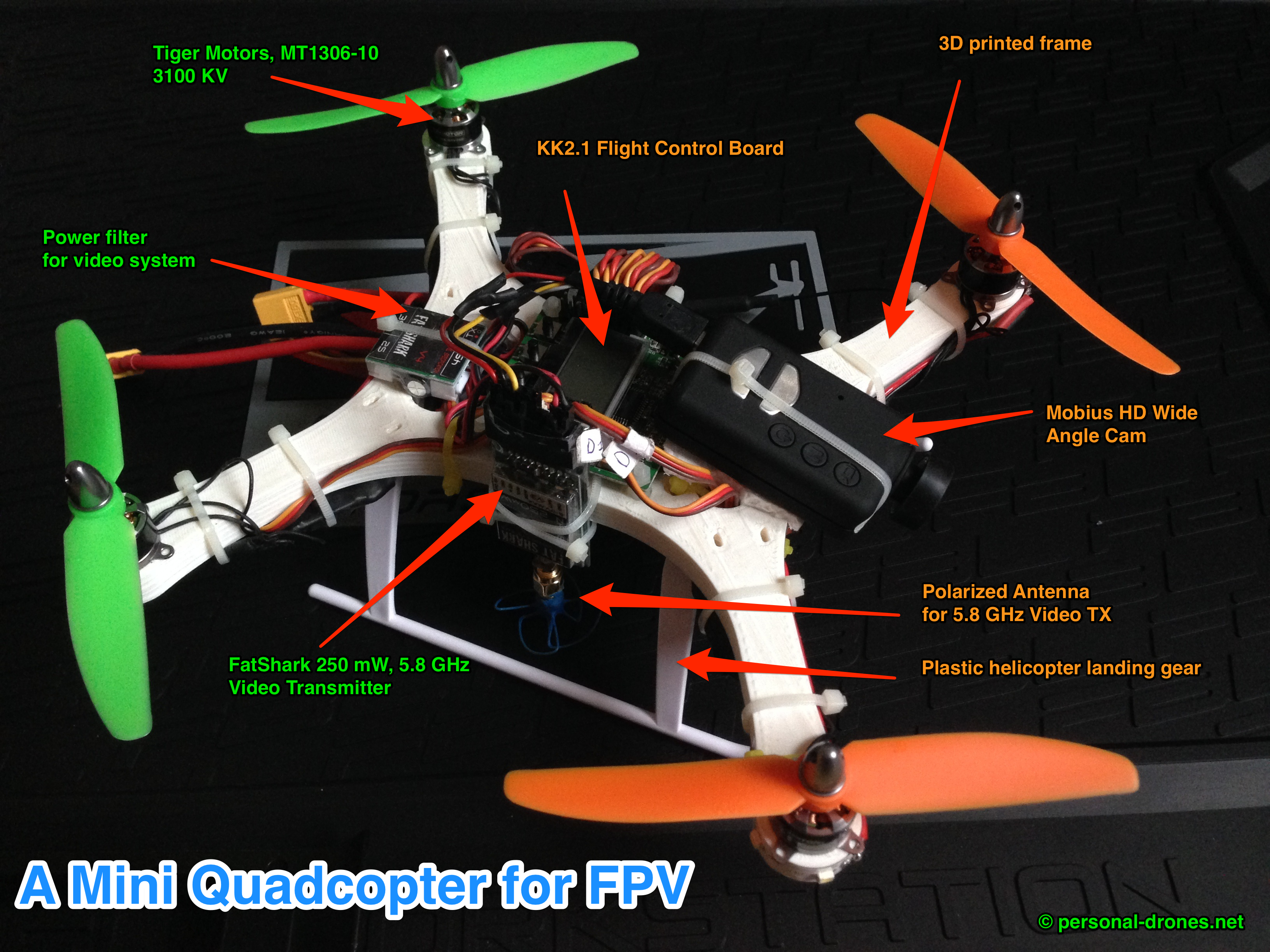
I’d like to report here some details of my last personal drone build, a mini quadcopter for First Person View (FPV) flight.
A manually assembled mini quadcopter for FPV
Weight: 360 gr w/o battery. With 2200 mA 2S battery: 487 gr.
Size: The 4 motor centers form a square with a side of 17,5 cm and a diagonal distance from front motor to back motor of 25 cm. So the quad is in the 250 class. Continue reading Building a mini quadcopter for FPV→
A quest toward the perfect quadcopter or multirotor for aerial video and personal flying freedom and a permanent survey on the latest quadcopter news and multirotor news
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt-out if you wish.AcceptPrivacy and Cookies Policy
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.