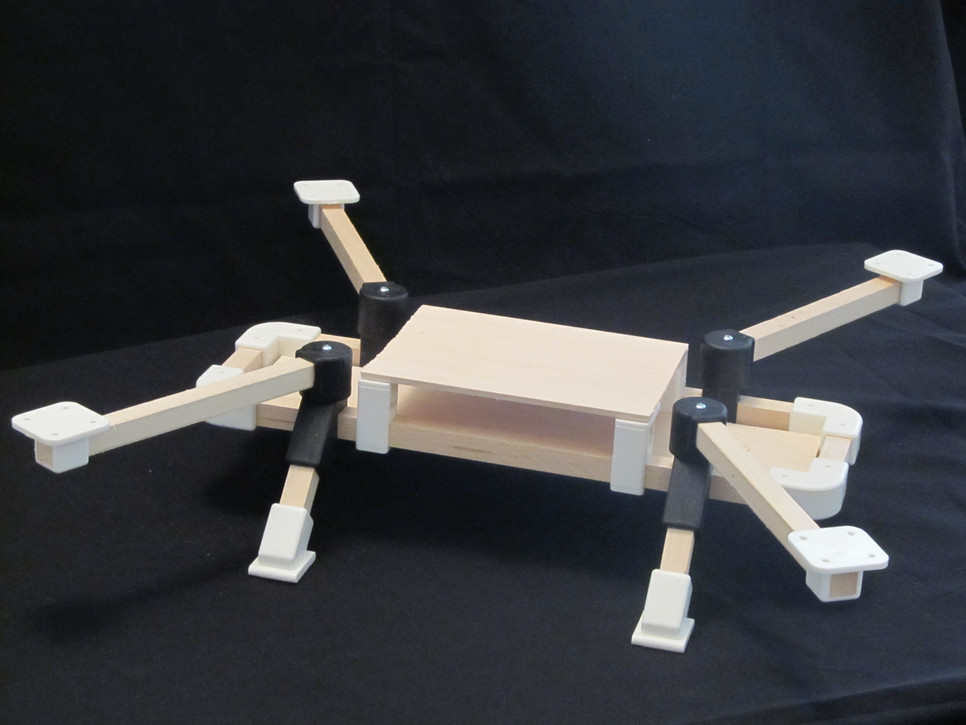
Check out this nice post by Jake Wells on DIYDrones. Features a video that summarizes the build of great DIY quad, out of a plastic box and some wood pieces.
Main features of the quadcopter are portability, durability and to be waterproof.
BoxCopter, partly folded inside the body box for portability
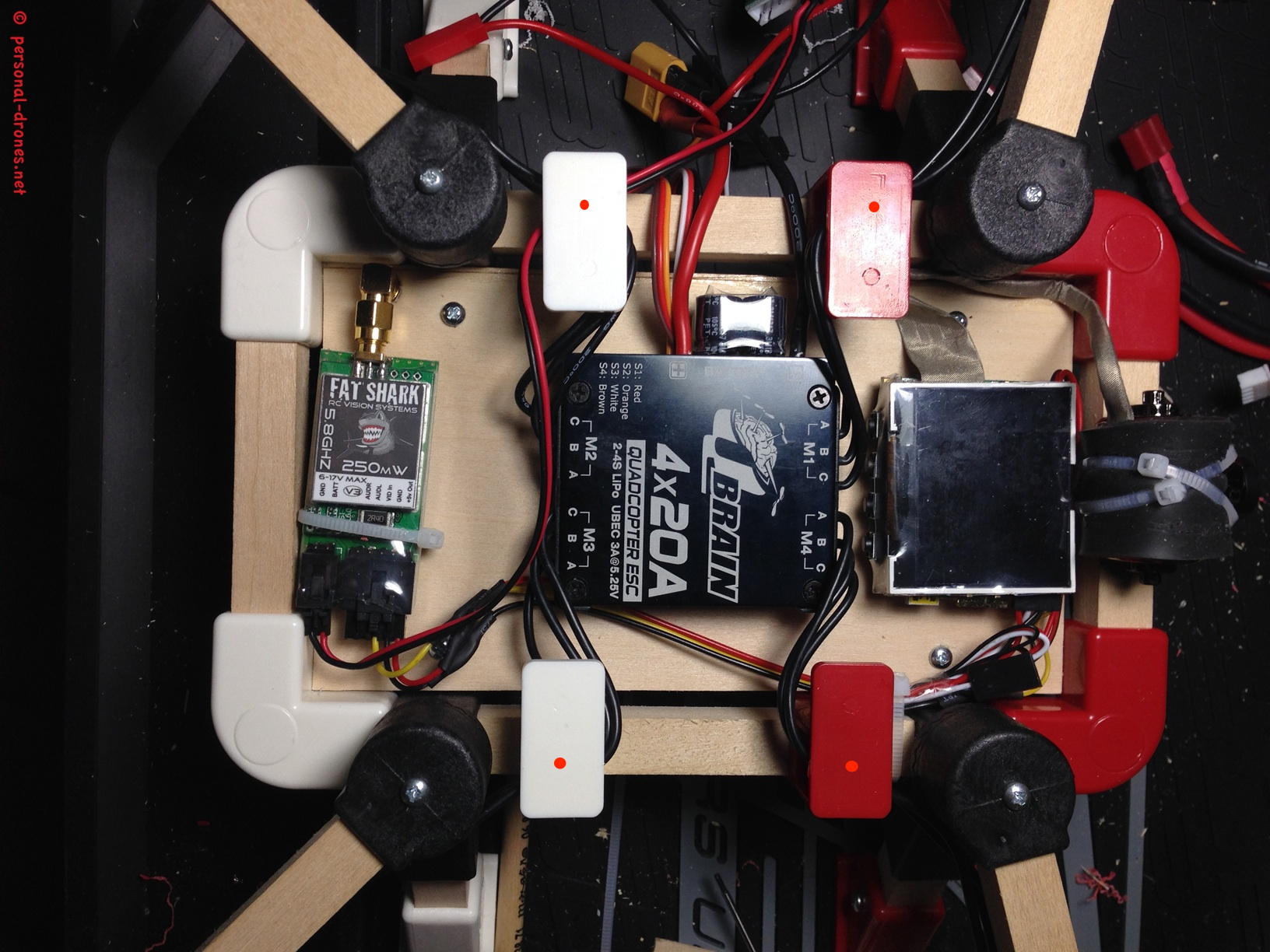
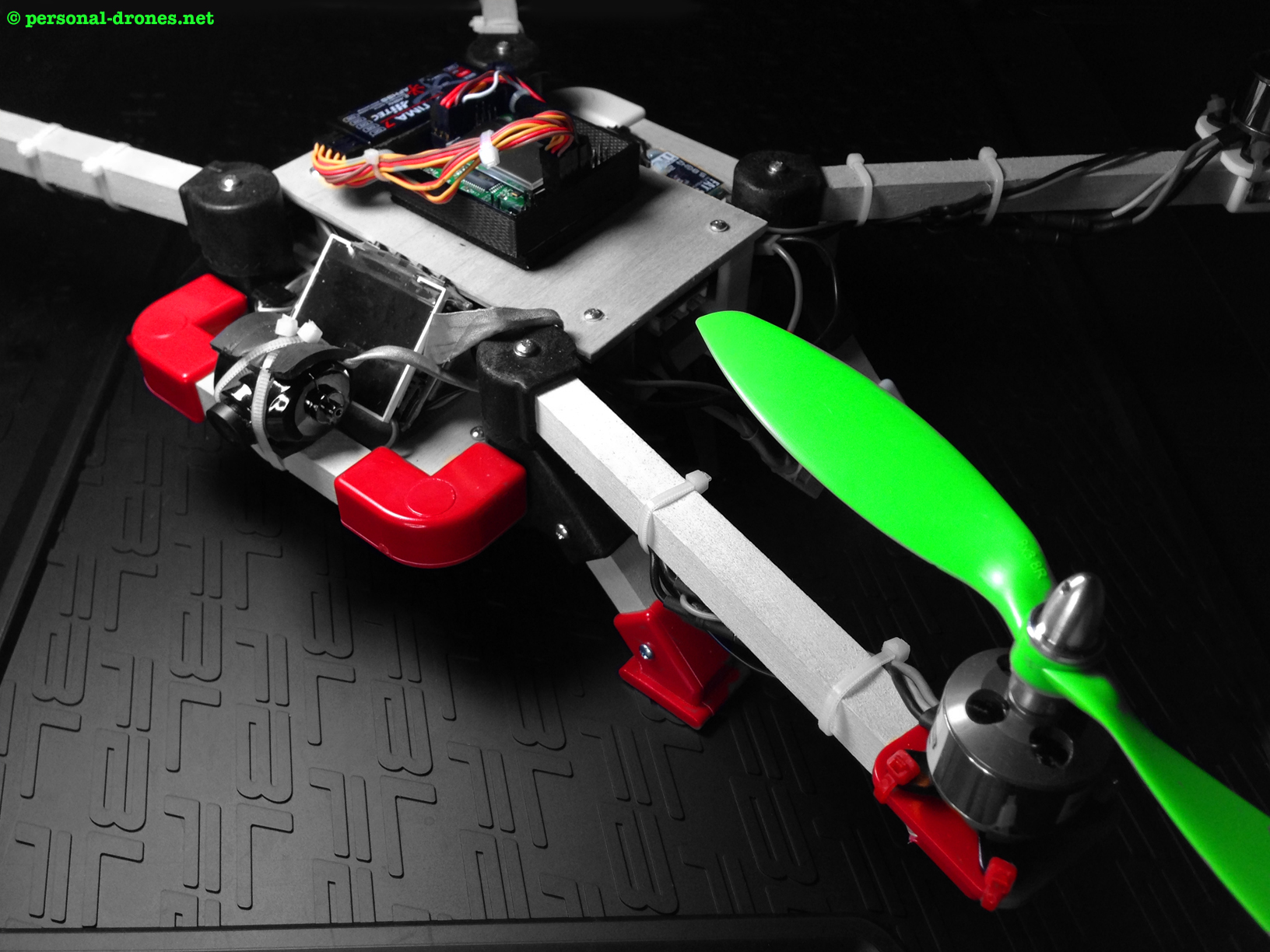
If you followed up to here in this multi part article on the Quadlugs multirotor building system, you know that we are now at a stage in which we have a basically fully assembled 480 mm quadcopter, with motors, escs, and FPV equipment in place. In the image below the placement of the electronics on the lower board is shown. We will have to drill the 4 positions marked by red spots in the figure in order to secure the upper deck in place.
Electronics on lower deck. Points to drill to secure the upper deck are marked with red spots
We now need to finish the build by mounting the upper deck with control board and radio receiver. mounting the upper deck is straightforward. First, drill the upper plate lugs in the positions marked in the figure above. You should do this with extreme care as the ESC wires, in the suggested configuration, run into the lug hole. You could also remove the wires while you do this, or drill before inserting the wires. Then with a pencil, carefully mark the position that correspond the the drilled holes to the wood board. Mind that the board, like the lower board, is larger than required. I did cut down mine to 8.5 x 13.5 cm in order to fit this design. Continue reading QUADLUGS MODULAR MULTIROTOR SYSTEM QUADCOPTER BUILD AND REVIEW – PART 4→
In part 1 and part 2 of this “build and review” article I made a general overview of the Quadlugs modular system and showed how to fully assemble a 480 mm frame. The whole process takes a few hours, especially the first time, when you have to figure out a number of things. I am sure that on my second build (there will definitely be one) things will go much faster. Also, since the things I had to figure out are all included in this review, if you follow instruction closely, and also check out the Quadlugs build videos, then the build of the frame should be really straightforward. Speed will also depends somehow on your personal DIY skill, although I promise that putting the frame together is something that anyone can do.
The frame is now ready, see part 2. Only the top plate remains to be secured in place, however this will be done after all the electronic equipment is mounted.
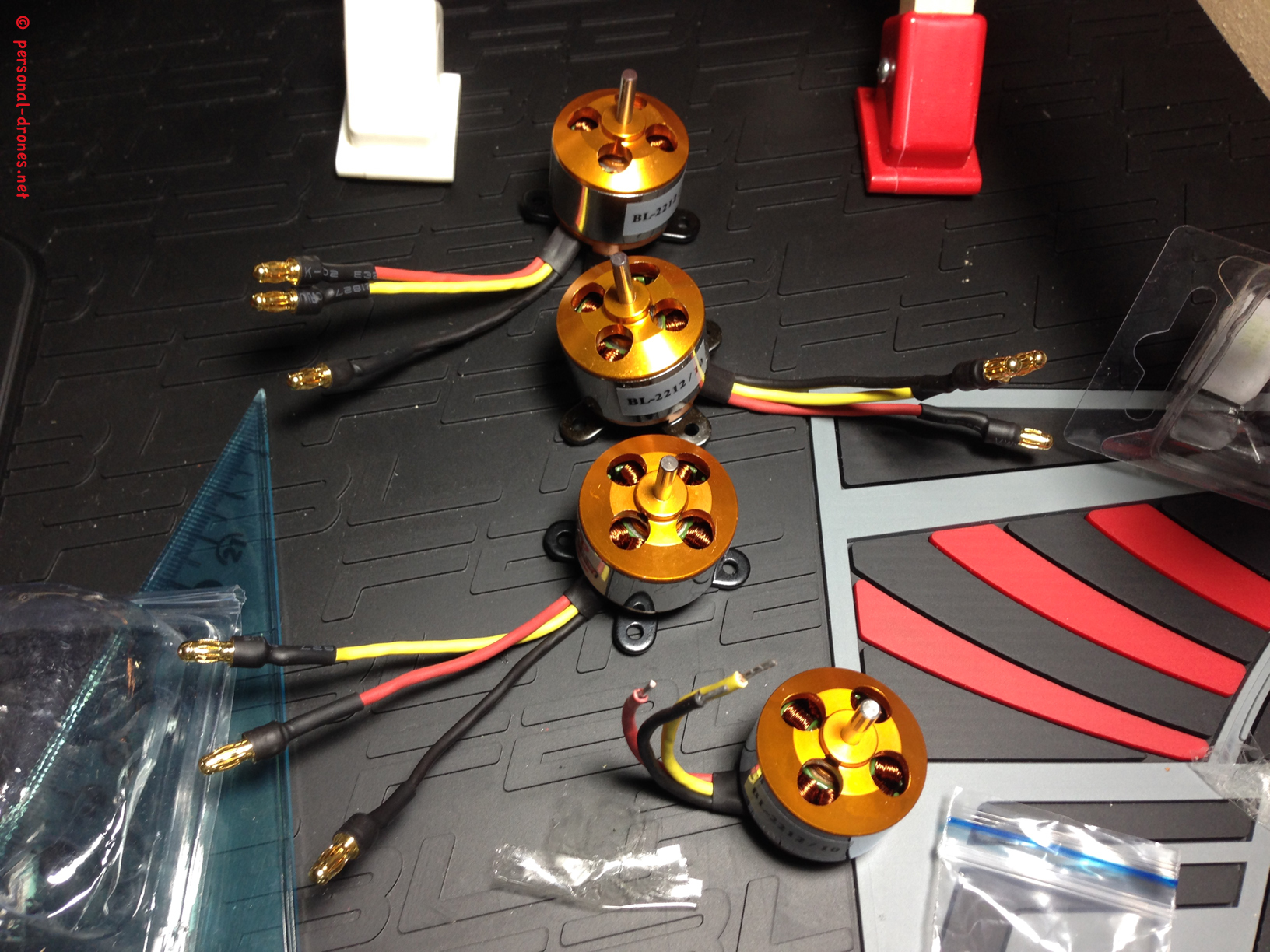
Let’s start by fixing the motors to the motor mounts. In this case, the motors came without the needed 3.5 mm gold connectors (link) pre soldered to the wires, so I had to solder the connectors myself:
Suppo motors 1100 KV, soldering of 3.5 mm gold bullet connectors in progress, 3 out of 4 motors done.
In part 1 of this build and review article I have been looking at the general features of the Quadlugs multirotor modular system and some preparation steps required before the actual frame assembly, namely the drilling of holes in some of the lugs.
2. Quadlugs quadcopter frame assembly
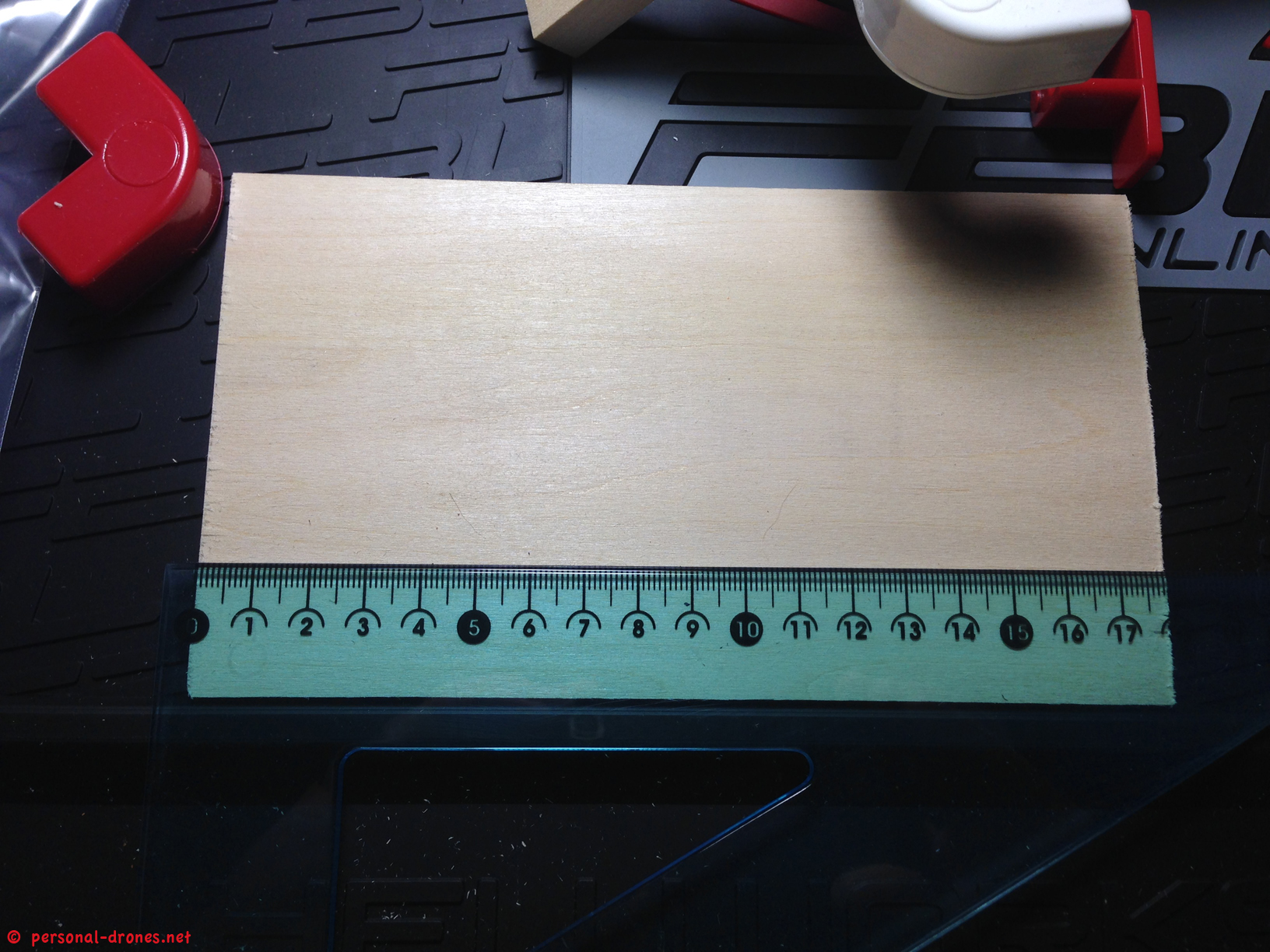
Before we actually assemble the frame, we have adapt the bottom plate, which is slightly larger than possibly needed.
The original size of the provided bottom plate is 17,9 x 10,1 cm (and 3 mm thick):
Measuring the bottom plate heightMeasuring the bottom plate width
I have received a nice USPS box from Danny, funder of the Quadlugs multirotor modular system and started a build with the main purpose of testing this original piece of technological equipment for strengths and weaknesses, report to our blog readers and providing a build blueprint for others that might want to built their own Quadlugs based multi rotor.
A packet from Quadlugs!A mounted Quadlugs frameThe result of quite some work on the packet contents: a Quadlugs 480 build for FPV, straight from the Personal Drones Blog! Stay with us and build yours by following our simple instructions
Picture this. You are trapped with your car in a long line of traffic and have no idea about how long the line is, if there is an accident ahead and how far.
The AT Black Knight Transformer, the world’s first roadable VTOL aircraft. It is designed to be a low-cost rapid response ambulance to evacuate wounded soldiers from the battlefield or transport cargo.
We have recently reported about DHL’s plans on integrating multirotors in the delivery chain of some mission critical goods such as medicines, see the original post here.
DHL microdrone for the new drone delivery service
The multirotors selected for the mission are the Microdrones md4-1000. Not so “micro” for the standards of this blog.
Make Magazine has published a nice, entertaining and generous article by Eric Cheng on quadcopters flown over water.
Crashes and fly aways are of course part of the story, therefore maybe when doing footage on water environments it could be worth considering a specialized solution such as a a Quad H2O?
The research group of the Institute for Dynamics Systems and Control, led by Raffaello D’Andrea at the ETH of Zurich, in collaboration with a team of architects led by Fabio Gramazio and Matthias Kohler, presented an installation in which a swarm of quadcopters autonomously pick up sequentially 1500 foam bricks (500 gr each) and position them at the right place to build a 6-meter tall tower with a sophisticated shape.
A quest toward the perfect quadcopter or multirotor for aerial video and personal flying freedom and a permanent survey on the latest quadcopter news and multirotor news
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt-out if you wish.AcceptPrivacy and Cookies Policy
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.