DHL quadcopter for the new drone delivery service – source
For the test drive, or maiden flight, the selection of what to carry and deliver was highly significant and probably want to send a message: a packet with a medicine was delivered from a Bonn pharmacy to the DHL headquarters, a two minutes journey.
This screenshot from the DHL web site indeed is indicative of an attention of DHL to the logistics of deliveries for Life Sciences and Health Care:
DHL dedication to Life Sciences and Healthcare
The quadcopter weights about 3Kg and was called the “Paketkopter”.
The DHL “Paketcopter” quadcopter for urgent deliveries – Source
The test flights required permission from local aviation authorities.
The Arendatorovnet youtube channel is quite active recently and three new videos were posted today. These videos are unique in that the quadcopter (and his pilot of course) are apparently experiencing a total freedom of movement in the Island of Ko Samui in Thailand. This is of great inspiration for me, and possibly many other FPV enthusiasts, in relation of what First Person View (FPV) is about.
Those last videos were apparently recorded on the down/ground side of the video link and are likely close to what the pilot was actually seeing in his video goggles during navigation. The pilot shows complete control even in a few moments in which the video link looses strength.
In this first video, there is a moment in which the quadcopter stops to “play” with dogs. We have recently noted the interesting relationship between quadcopters and dogs, and this is a nice example. The dogs seem rather scared of the multirotor and do not dare approaching too much, although they indeed show interest. This starts at 14:35 of the following video, FPV Taras 3:
https://www.youtube.com/watch?v=fHaLdpE_Dzo
Low quality, video interferences and the “electronic background” audio on these last videos provides a special flavour to them, contributing to making the whole thing very special. Here are the other 2 videos.
FPV Taras 4. See how the quad greets people with a little oscillation, for example at 6:25
We have recently discussed the importance of security in the world of quadcopters and multirotors and indeed security is at the heart of the ongoing debate on FAA regulations of the US airspace in relation to RC models, that of course include our beloved multirotors.
In our previous article we had noted how, in a presentation of Prof. Raffaello D’Andrea from the ETH Zurich, there is a bit of extreme interest for the security of quadcopter flights: Prof. D’Andrea showed that on cutting out two propellers from a quadcopter, the machine can still fly by adopting a different flight pattern, in which the quad continuously rotates on itself (yaws). Not very practical for shooting some stable video, but possibly great to avoid a crash.
And indeed the team of Prof. D’andrea now expanded on this part of the research and presented a video in which the same mechanism, a failsafe algorithm, is activated automatically during flight on a propeller failure.
Hopefuly we might see this as a selectable option on the next generation of flight controllers. DJI, what about implementing this on the next NAZA update? We might read some less news on quadcopters falling from the sky of Manhattan maybe and flying a quadcopter near people could become slightly less of a concern.
Next we’d like to see some efficient automatic avoidance mechanism. This would be another piece of the puzzle that needs to be completed to make multirotors really secure in a near future.
Just stumbled upon a video from Flite Test that features the Stingray 500, a full collective pitch 3D quadcopter Curtis Youngblood. The photos posted below are from the Flite Test review page on the Stingray 500.
The Stingray 500 by Curtis Youngblood
Here’s the Flite Test Video on youtube that features an interview to Curtis Youngblood and test flight of the Stingray:
If you look closely at the propellers, you will see that these look more that helicopter blades than normal multirotor propellers.
Indeed the propellers have a variable orientation that is the secret of the 3D flight capabilities of this beautiful flying machine. If you are familiar with the way a normal quadcopter flies you will see from the videos below that the maneuvers that can be performed with the Stingray are plain impossible with a normal multirotor.
The total freedom of movement in the 3D space make the Stingray suitable for Acrobatic flight.
The frame cover is designed to carry 2 cameras at the same time (fpr example a GoPro and a board camera), making this quad great for acrobatic FPV and for taking some very special aerial video.
In the video above Chris Youngblood displays amazing piloting skills, I wonder how easy or difficult is it to fly and perform some basic acrobatics with such a particular machine, so different from a “traditional” quad.
The quad is currently on sale on Curtis Youngblood web site for 799$.
We have been following closely (1–2) the youtube channel of Arendatorovnet, a Thailand based quadcopter enthusiast that is releasing, since a while, some stunning FPV videos.
In the last couple of days three new exciting videos were published that are again worth viewing from start to end. It is a full immersion FPV experience in which the quad really has it’s own life and covers long distances with ease. There must be some solid equipment behind these performances but the technical specifications for the radio and video links are still unreleased at this time.
I found out, on flying at local parks, that dogs are extremely interested in quadcopters. They spot them from far away, follow them, bark at them. On landing they approach to see what all this fuss is about. Then they will stop at a certain distance, realizing that this is not exactly what they expected to see. They don’t know how to deal with it. At the end of the following video I picked the quad up and put it down again near the PC bag where I carry it. The dogs came very near this time and had a good look at it. They were curious and interested. Maybe they were considering getting one too.
http://www.youtube.com/watch?v=T0KEo0lejTI
On looking up on youtube, I realized that dog’s interest is a common observation for multirotor pilots. Here’s another well documented interaction:
and more:
and beware, this is a full blown dog attack on a multirotor:
http://www.youtube.com/watch?v=YLz00N4pK90
Had any experience on quadcopters and dogs? Thanks for sharing below!
I recently made a post about Blackout’s Mini-H-Quad. It is a great small size FPV platform, that will possibly host full size/full potency FPV equipment that is normally mounted on bigger quads. Sounds great for a lightweight personal drone that you can easily fit in a medium sized PC bag together with the radio and a handful of batteries. Get yours HERE.
In this post I would like to share my current setup for the Mini H Quad. It is probably not the lightest possible configuration. I bet I could take off at least 5/10 grams of weight with some minimization here and there. Possibly the photos below could be a source of inspiration, or criticism, for others who wish to build or already built the same quad. Continue reading Blackout Mini H Quad, our latest FPV quadcopter build details→
Gizmaz has published a nice review of the new DJI Phantom vision quadcopter.
The new Phantom Vision quadcopter from DJI
With it’s on board wide angle, high resolution camera, and the 25 plus minutes of flight time, the Phantom 2 brings a wealth of new features to the lucky owners.
Click on the image below to go to the DJI Innovations web site.
Let’s see the new features in detail in this Gizmag video:
If you plan to buy one of those you might also want to check out this video from the Roswell Flight Test Crew that covers unboxing and all you need to setup your new little personal drone:
And here’s a solid 28 minutes uncut flight (ok, from DJI) with the new phantom:
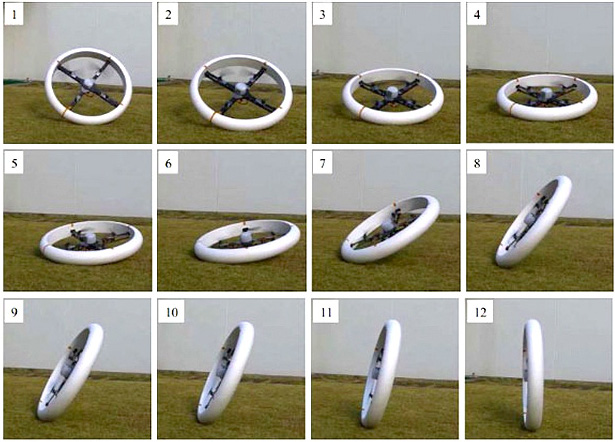
MUWA: Multi-Field Universal Wheel for Air-Land Vehicle with Quad Variable-Pitch Propellers. A complicated name for a new prototype quadcopter that can perform a number of functions usually not associated with multirotors, such as rolling and floating.
Here’s the rolling drone:
MUWA: Multi-Field Universal Wheel for Air-Land Vehicle with Quad Variable-Pitch PropellersThe MUWA quadcopter
This is not for fun. It is a research project developed in a robotics lab in Tokyo University and has a number of very serious potential applications that are briefly shown in the video that we post below. Those include capturing 3D images of environments, for example closed spaces, maybe difficult to reach otherwise.
The device can of course perform also perform as a regular quadcopter. It flies nicely.
With the raise in availability of drone technology, Merseyside police in the UK thought it would be a good idea to acquire a drone, actually a 13.000£ quadcopter, to aid in law enforcement tasks.
And here is the drone in operation live:
November 2009: Merseyside police acquires law enforcement quadcopter
The quadcopter is put to use, officers are trained.
February 2010: Merseyside police makes the first arrest in the UK based on drone technology, by helping in locating a car theft suspect – BBC article
However about one week later, it turns out that the police did not have the required Civil Aviation Authority (CAA) permission to fly the quadcopter.
“CAA said it needed to be consulted over any use of the drones, that can fly up to 400ft and reach speeds of 30mph.”
February 2010: Merseyside police drone is grounded for the lack of the required flight permissions by the CAA – BBC article
The police subsequently filled out the required paperwork and obtained all the permissions to fly the drone.
During a flight training session the drone apparently looses battery power and crashes into a river. Officers responsible for the crash were “given advice” (a dressing down in police slang). The costs of the incident were covered by insurance. Interestingly
“during its use officers recognised certain technical and operational issues including staff training costs and the inability to use the UAV in all weather conditions.
“These issues in conjunction with the current financial climate resulted in the decision being made by chief officers not to replace the unit.”
October 2011: Merseyside police drone ceases operations
This story is very interesting as it is an example of trying to put to work an idea that in principle seems potentially productive, and then coming in touch with all the hidden problems involved and the technical and, not least, budget limitations. I think the idea was good but the technology was still too young in 2009 to make drone law enforcement become a reality on a limited budget. I would guess that if the very same program was started today, it would probably have more chances of success as there was so much research and development done from 2009 to today in multirotors technological development, navigation systems, better and lighter frames with higher payloads, longer flight times, better resistance to variable weather conditions etc.. We can see this as an early, brave experiment that failed. We’ll probably see other similar program succeed more and more in the future, as technology evolves and equipment prices drop steadily.
A quest toward the perfect quadcopter or multirotor for aerial video and personal flying freedom and a permanent survey on the latest quadcopter news and multirotor news
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt-out if you wish.AcceptPrivacy and Cookies Policy
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.